
IP-2-3-FE4 – Systèmes embarqués
Référence au texte officiel
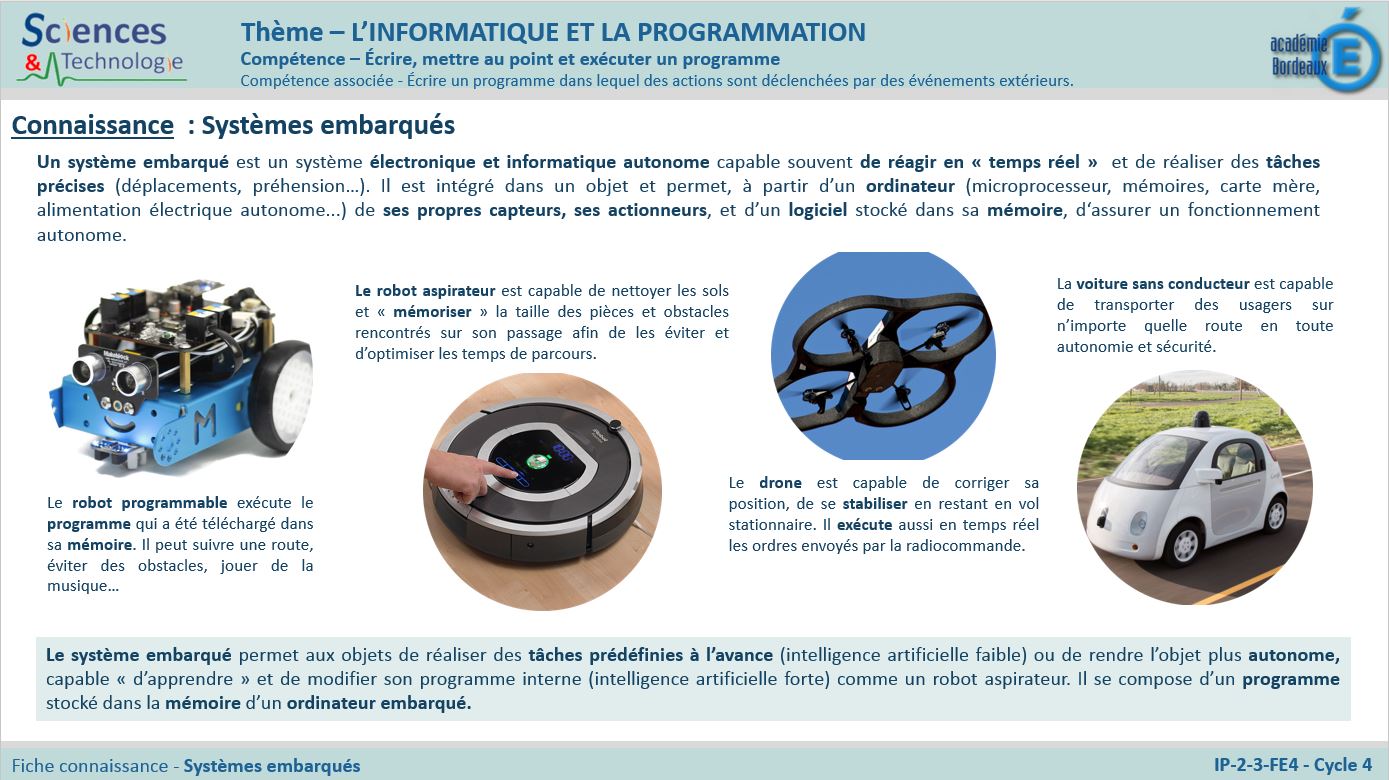
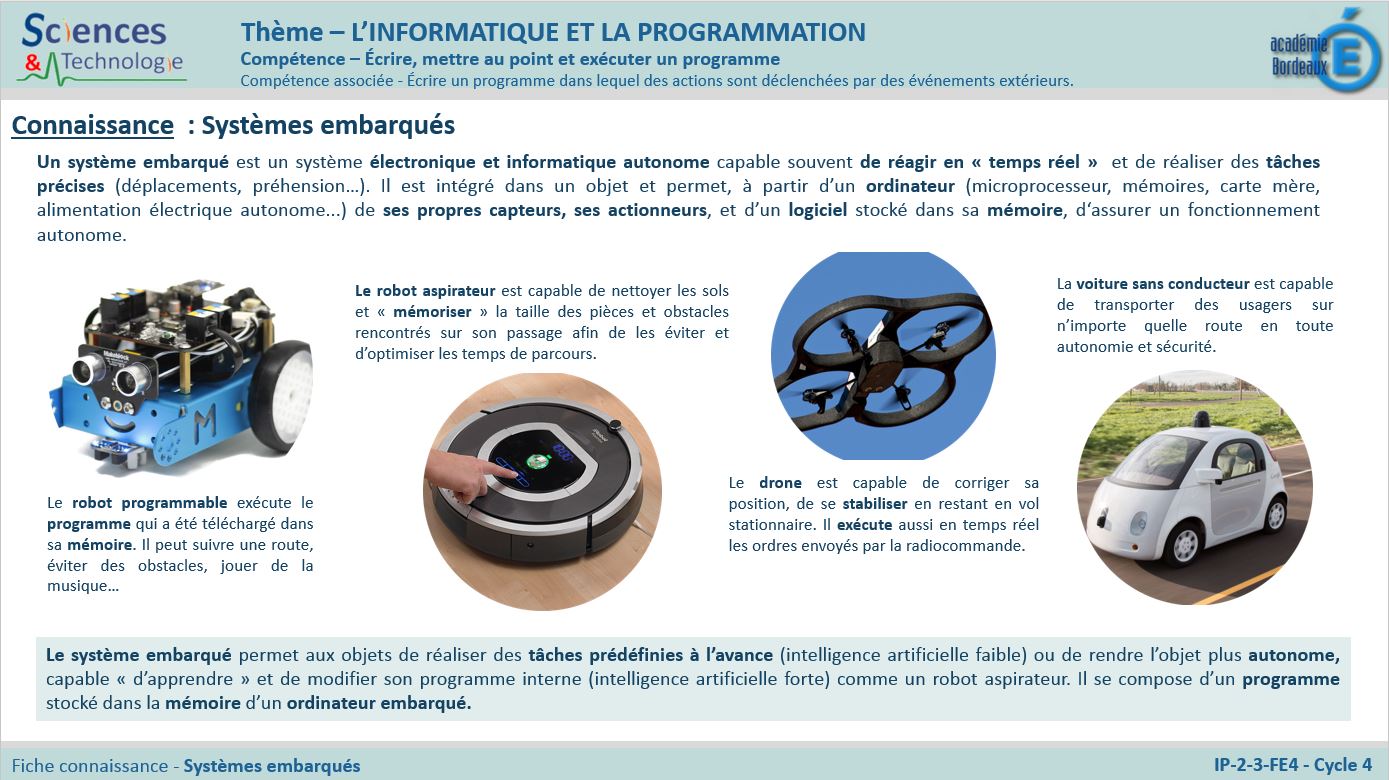
THEME : L’INFORMATIQUE ET LA PROGRAMMATION
| Connaissances et compétences associées | Exemples de situations, d’activités et de ressources pour l’élève |
| Exprimer sa pensée à l’aide d’outils de description adaptés | |
|
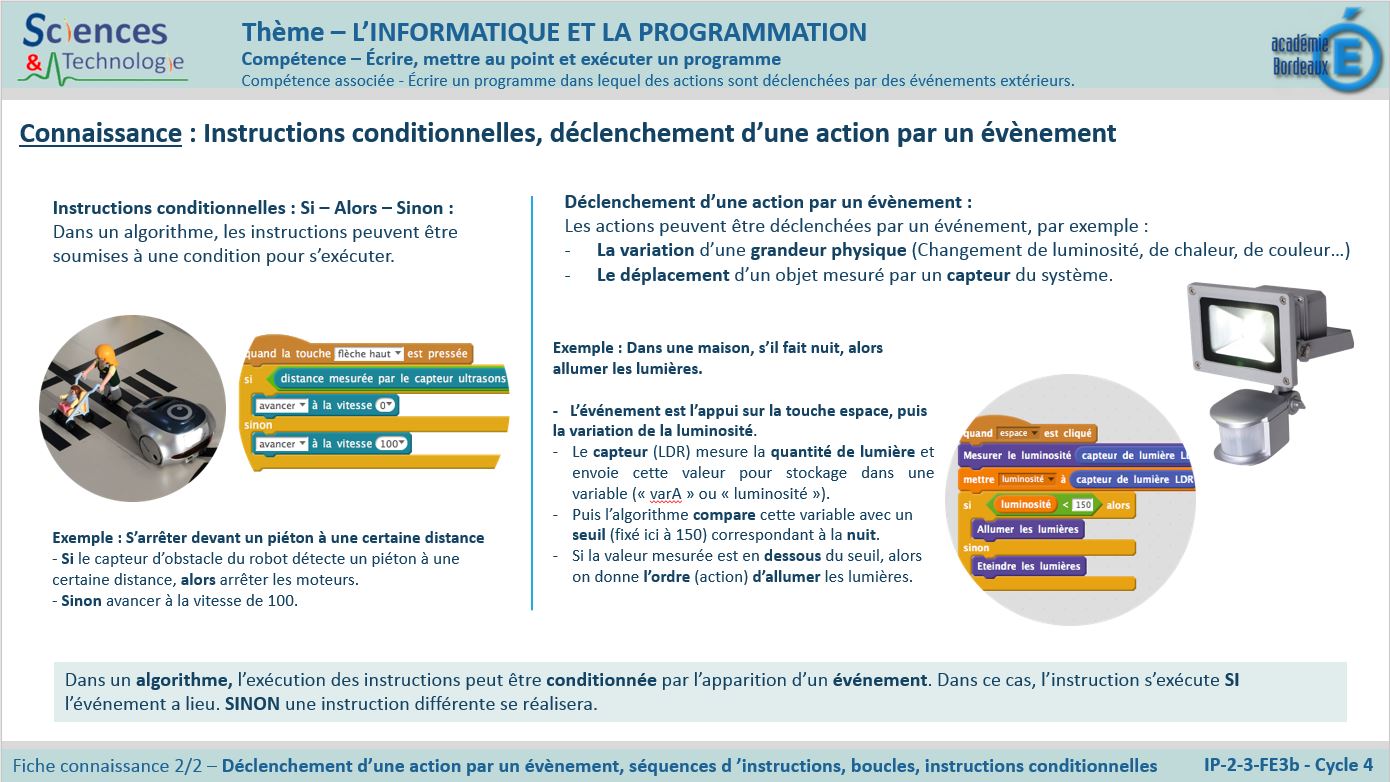
Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs. |
Concevoir, paramétrer, programmer des applications informatiques pour des appareils nomades. Observer et décrire le comportement d’un robot ou d’un système embarqué. En décrire les éléments de sa programmation. Agencer un robot (capteurs, actionneurs) pour répondre à une activité et un programme donnés. Écrire, à partir d’un cahier des charges de fonctionnement, un programme afin de commander un système ou un système programmable de la vie courante, identifier les variables d’entrée et de sortie. Modifier un programme existant dans un système technique, afin d’améliorer son comportement, ses performances pour mieux répondre à une problématique donnée. Les moyens utilisés sont des systèmes pluritechnologiques réels didactisés ou non, dont la programmation est pilotée par ordinateur ou une tablette numérique. Ils peuvent être complétés par l’usage de modélisation numérique permettant des simulations et des modifications du comportement. |
Exemple de structuration de connaissances
{kind=link}
 Fiche élève format image |
 Format vidéo Mp4 |
 Format vidéo Web-M |
 Fiche professeur PDF |
Exemple d’exploitation pédagogique – 5ème
| Pistes de situations déclenchantes |
|
| Pistes problèmes technologiques |
|
| Ressources Outils à exploiter |
|
| Pistes d’activités | Demander aux élèves de :
|
| Exemples d’objets supports |
|
Exemple d’exploitation pédagogique – 4ème
| Pistes de situations déclenchantes |
|
| Pistes problèmes technologiques |
|
| Ressources Outils à exploiter |
|
| Pistes d’activités | Demander aux élèves de :
|
| Exemples d’objets supports |
|
Exemple d’exploitation pédagogique – 3ème
| Pistes de situations déclenchantes |
|
| Pistes problèmes technologiques |
|
| Ressources Outils à exploiter |
|
| Pistes d’activités |
|
| Exemples d’objets |
|
Pour aller plus loin
- http://www.futura-sciences.com/magazines/high-tech/infos/dico/d/technologie-systeme-embarque-15282/
- https://fr.wikipedia.org/wiki/Système_embarqué
NB : Ces propositions sont mises à disposition pour aider chacun dans sa réflexion mais elles n’ont pas pu être finalisées par manque de temps. Ces fiches seront donc améliorées au cours du début d’année.