Modélisation sous Matlab Introduction…

Introduction à la modélisation et présentation de « MATLAB-SIMULINK »
La démarche de modélisation en pré-bac :
L’évolution rapide des technologies amène l’homme à concevoir des systèmes de plus en plus complexes dont le comportement ne peut plus être modélisé sans l’aide des logiciels de simulation.
Les interactions entre les composants étant nombreuses, il est primordial d’être en mesure de modéliser le système dans sa globalité en prenant en compte sa structure, son dispositif de commande et son environnement.
Les chaînes d’énergie et d’information ne peuvent plus être modélisées séparément mais doivent être intégrées dans un modèle unique.
A partir de ce modèle il sera possible d’évaluer avec précision les écarts entre les résultats simulés et les mesures effectuées sur le système réel.
Cette approche, qui s’appuie sur la décomposition de la complexité fait apparaître des sous-ensembles qui mobilisent chacune des technologies différentes. Le décloisonnement des univers technologiques est donc nécessaire à la mise en place d’une démarche de modélisation.
L’évolution très rapide des logiciels de simulation nous permet maintenant de modéliser toutes les parties d’un système à l’aide d’un logiciel unique. Cette approche multidisciplinaire, permet de gérer les échanges entre les sous-systèmes et de disposer de résultats qui prennent en compte la totalité des phénomènes physiques qui entrent en compte dans le fonctionnement du système. La pertinence des résultats est accrue et la mise en évidence des interactions devient possible.
En contrepartie, la maitrise des outils de simulation mobilise un champ de compétences plus large et impose un processus d’apprentissage structuré. Cette nouvelle approche requiert un outil de modélisation et de simulation à environnement unique, visuel et interactif, validé industriellement et proposant tous les outils de modélisation de la chaîne d’information (régulateur classique, diagramme d’états…) et de la chaîne d’énergie (bibliothèques de composants avancées, maquette CAO intégrée…).
Le logiciel MATLAB-Simulink :
Ce logiciel propose de nombreux outils permettant de mettre en œuvre une démarche de modélisation globale multiphysique. La première étape est de sélectionner une palette d’outils adaptés permettant de modéliser les systèmes dans le cadre de l’application des programmes des Sciences Industrielles pour l’Ingénieur.
Il est préférable, avant d’aborder la phase de prise en main de ces outils, d’avoir une vision globale de leurs fonctionnalités et de leur approche causale ou acausale. La pertinence de la démarche de modélisation réside avant tout dans le choix de l’outil adapté pour modéliser les différentes parties du système. La maitrise structurelle de ces outils et de leur potentiel garantira la réussite du processus de modélisation.
La plate-forme de base du logiciel est l’environnement « MATLAB-Simulink« .
- SIMSCAPE propose une approche acausale de la modélisation et permet de faire de la modélisation par assemblage de composants. Le comportement physique des composants est pris en compte directement par le logiciel, il est donc possible de modéliser un système sans avoir à écrire l’équation différentielle qui caractérise son comportement.
Il est préférable, avant d’aborder la phase de prise en main de ces outils, d’avoir une vision globale de leurs fonctionnalités et de leur approche causale ou acausale. La pertinence de la démarche de modélisation réside avant tout dans le choix de l’outil adapté pour modéliser les différentes parties du système. La maitrise structurelle de ces outils et de leur potentiel garantira la réussite du processus de modélisation.
La plate-forme de base du logiciel est l’environnement « MATLAB-Simulink« .
Les connexions entre deux composants ne sont pas orientées, ont une signification physique et transmettent un niveau d’information supérieure aux connexions en modélisation causale. Ces connexions peuvent être un fil électrique (transfert d’information de type courant et tension), un arbre moteur (transfert d’information de type couple et vitesse angulaire), l’extrémité de la tige d’un vérin (transfert d’information de type force et vitesse linéaire)… Le principe de calcul s’appuie sur un bilan de puissance à chaque noeud du modèle et ne repose pas sur le principe de causalité, d’où le nom de modélisation acausale.
Ci-dessous un exemple de modélisation Simscape:
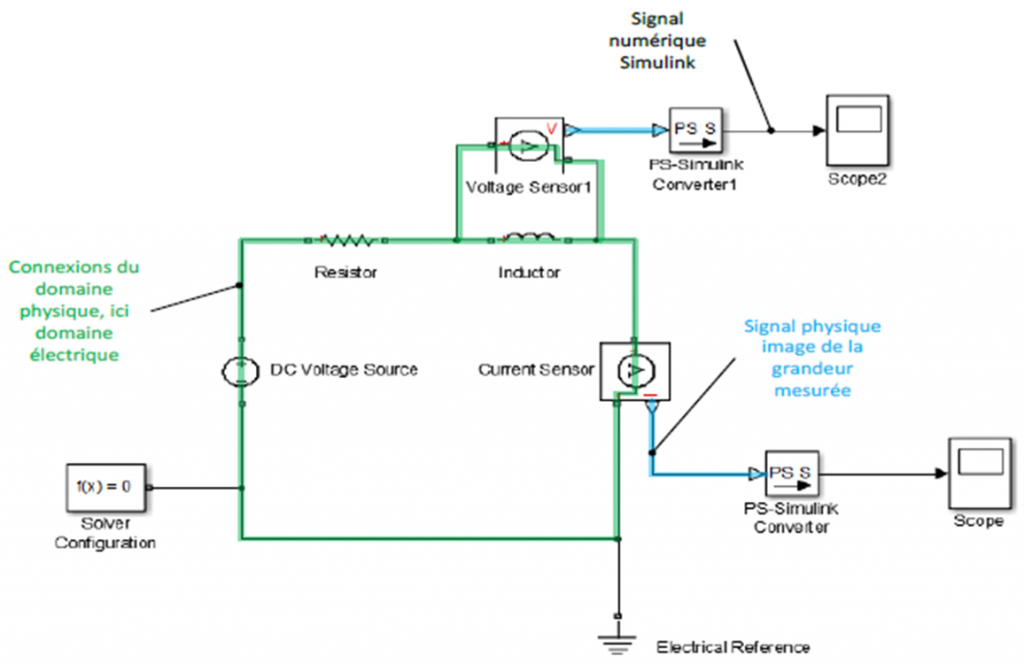 |
On remarque d’ores et déjà (nous y reviendrons dans les exemples) que certains blocs et certaines liaisons appartiennent au monde physique (couleur verte et bleue). D’autres grandeurs sans unités et sans couleur appartiennent à Simulink. Pour réaliser une connexion entre ces deux mondes, il faut utiliser les interfaces « PS S » et « S PS » (dont on parlera plus tard dans les ressources).
Simscape inclue une bibliothèque de composants élémentaires dans toutes les technologies (mécanique, électrique, hydraulique, pneumatique, thermique et magnétique) et comprend également différents modules. Chacun de ces modules explore un champ technologique spécifique et propose une modélisation de niveau supérieur aux bibliothèques de base de Simscape .
SimMechanics : ce module permet d’importer des modèles CAO 3D et de les intégrer directement dans une modélisation multiphysique, un asservissement… Les propriétés cinétiques des pièces sont prises en compte.
SimPowerSystems : composants électriques (toutes les technologies de moteurs, alimentation, filtres, préactionneurs électriques…)
SimElectronics : composants pour l’électronique et la mécatronique (servo-moteurs, commande PWM, pont en H, convertisseurs, portes logiques…)
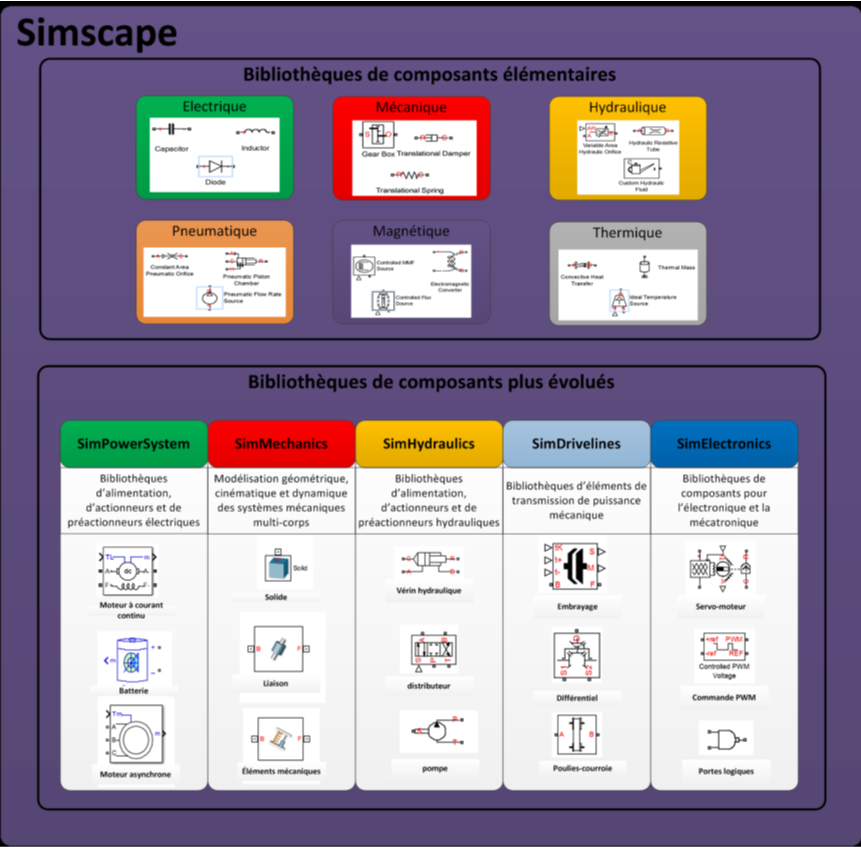 |
SimHydraulics : composants permettant de réaliser des circuits hydrauliques (toutes les technologies de pompes, distributeurs, vérins, clapets, soupapes…)
SimDrivelines : composants de transmission de puissance (réducteurs, freins, embrayages, différentiels, accouplements…)
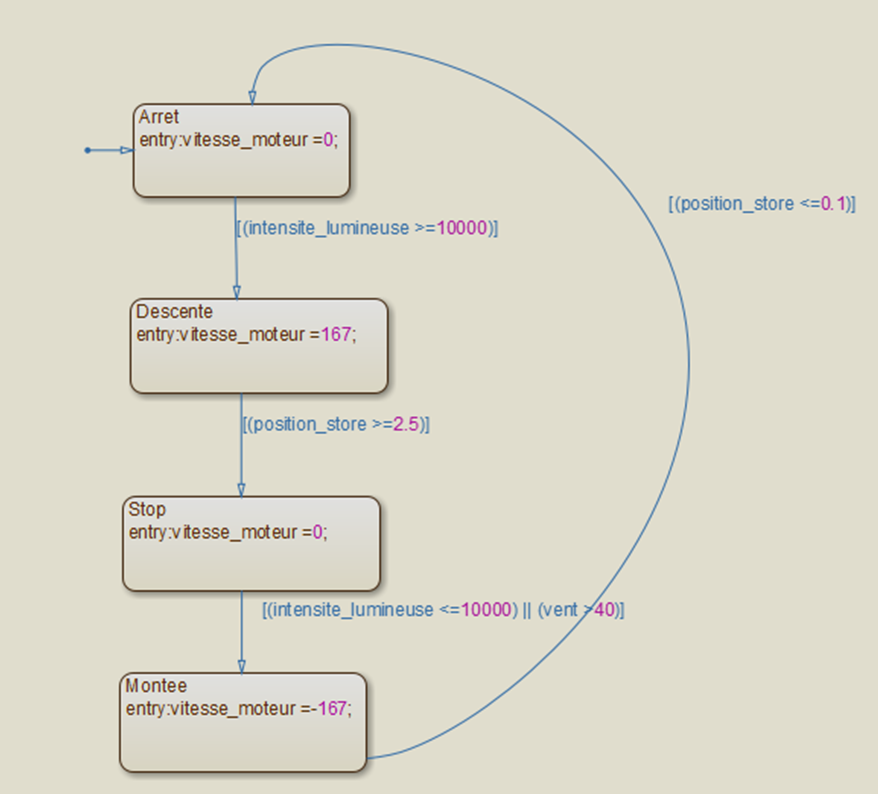
- STATEFLOW prend en charge la modélisation du comportement combinatoire et séquentiel des systèmes à partir d’une description sous la forme de diagrammes d’états (langage SysML), de flux logiques ou de tables de vérité.
Stateflow nécessite l’installation préalable d’un compilateur C pour fonctionner.
Ci-dessous un exemple de traitement pour un store automatisé:
 |
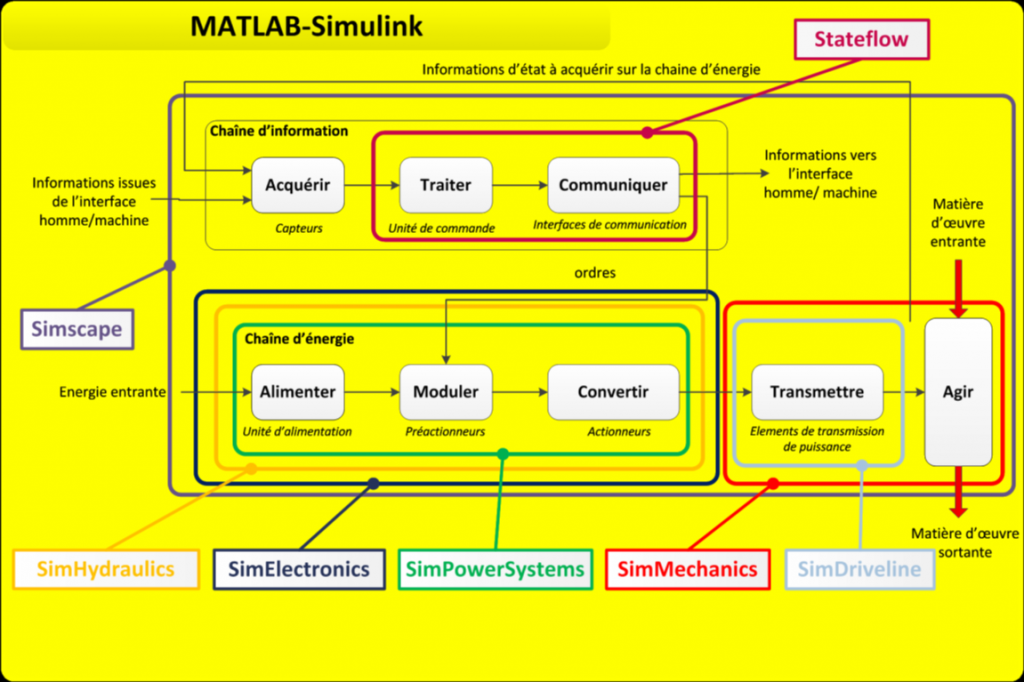
Conclusion : L’ensemble de ces interfaces graphiques communiquent entre elles et permettent de modéliser un système complet décrit par une chaîne d’énergie et une chaîne d’information.
 |